 After lot of research on different sites I finally managed to make a webcam remote servo for Raspberry controlled via HTML5 web interface. I will repeat here step by step the different points. I performed this that on a Raspberry PI2 but it should also work fine on the model B + see A.
After lot of research on different sites I finally managed to make a webcam remote servo for Raspberry controlled via HTML5 web interface. I will repeat here step by step the different points. I performed this that on a Raspberry PI2 but it should also work fine on the model B + see A.
Menu :
- Equipment
- Step 1: Assembling the servos
- Step 2: Connecting the servoes to the Raspberry board
- Step 3: Apache Web Server installation
- Step 4: ServoBlaster installation
- Step 5 : Web HTML5 interface
- Final result
- Improvements and Enhancement
Equipment :
- favorite Raspberry and webcam
- two servomotors eg SG90 9G Micro Servo Motor
- 3 x AAA 1.5v battery pack
- a 90 ° angle 4cm x 4cm (in all DIY stores)
Step 1: Assembling the servos
To assemble the support just stick the two servos with glue like in this photo:
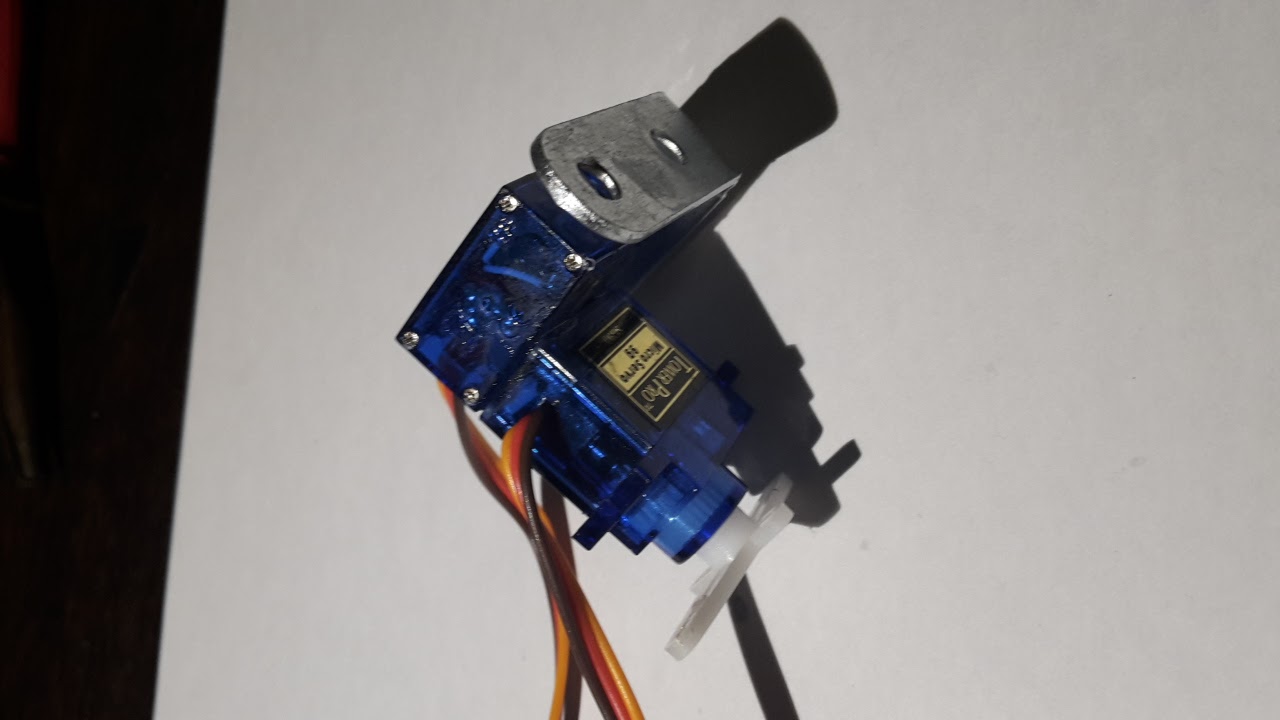
Stick the two servos by ensuring that their axes are perpendicular
Then the servo fix the bracket as with two screws (usually supplied with the servo):

servo fix the bracket using screws
Finally fix the “foot” on the battery box with glue:

Fix the “foot” on the battery case with glue
I know it’s not the most detailed how-to I provided but the pictures speak for themselves … In the end it looks like this:

Final view

With the 5PM Cam
Step 2: Connecting the servoes to the Raspberry board
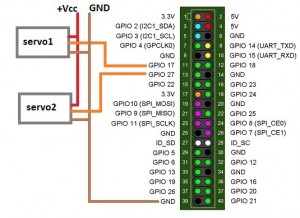
- Red wire (+ Vcc) of the servos must be connected to the + of the battery pack.
- Brown wire (GND) must be connected to the – terminal of the battery pack which itself is connected to the GND on the Raspberry (pin 39).
- Finally, yellow wire of servo 1 to pin 11 (GPIO 17) and yellow wire of servo 2 to pin 13 (GPIO 27).
Step 3: Apache Web Server installation
This step is optional if your apache server is already installed. If not to install it:
sudo apt-get update sudo apt-get upgrade sudo apt-get install apache2
You will find on the raspipress.com full details about installation and advanced Raspberry apache configuration.
To execute the command from the html page you need to add the www-data user in the sudoer. For this type:
visudo
and add the following lines
# User privilege for Servo CMD from apache www-data ALL=(ALL:ALL) NOPASSWD:ALL
This is not the best ion term of security and shoudl be improved if you plan to use this interface outside of you privite network.
Step 4: ServoBlaster installation
ServoBlaster (see doc here) is an interface that will allow you to easily control multiple servo motor from a Raspberry.
To install it:
sudo apt-get install git git clone git://github.com/richardghirst/PiBits.git cd PiBits/ServoBlaster sudo make
After setup you shoudl have a new interface in /dev/ :
ls -l /dev/servoblaster prw-rw-rw- 1 root root 0 Jan 25 19:23 /dev/servoblaster
Then to test teh setup and ServoBlaster you can issue the follwoing command :
echo P1-11=120 > /dev/servoblaster echo P1-13=120 > /dev/servoblaster
You can then try agin changing the value 120 …
Step 5 : Web HTML5 interface
The interface is really minimalist, you are free to modify it and adapt it to your needs and projects.
The php code is available here: https://github.com/Sirus10/servo/blob/master/index.php
But to get it on your raspberry simply do :
cd /var/www/ git clone git://github.com/Sirus10/servo.git
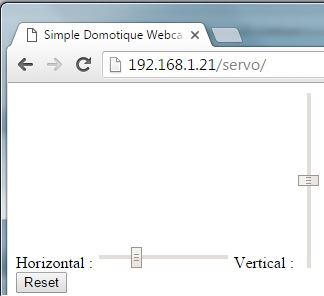
Page HTML5
Open the IP of your raspberry with a web brother and have fun!
Ex : http://192.168.1.21/servo/ :
Final result :
Enhancement and developments:
This are really the basis, there is plenty of opportunity to integrate it into a webcam for example, or any other interface. This is just a beginning …
- use jQuery instead of having to reload each time the php page
- canva to be use with HTML5 ?
- Reverse the vertical servo